Iphleandro-blog - Real









More Posts from Iphleandro-blog and Others


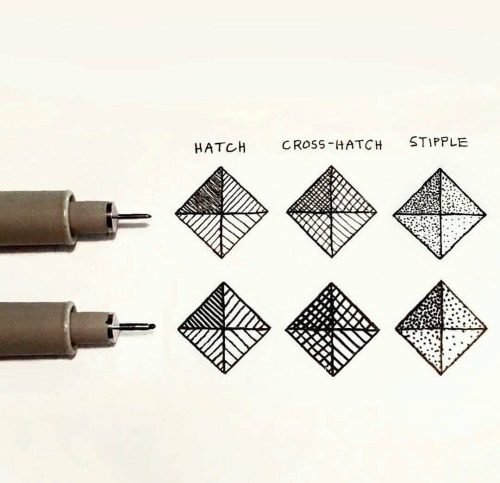
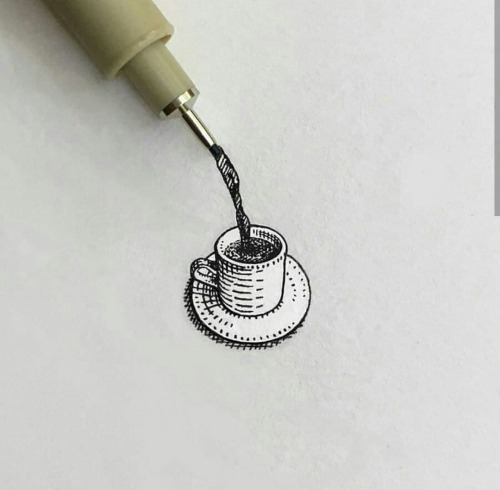
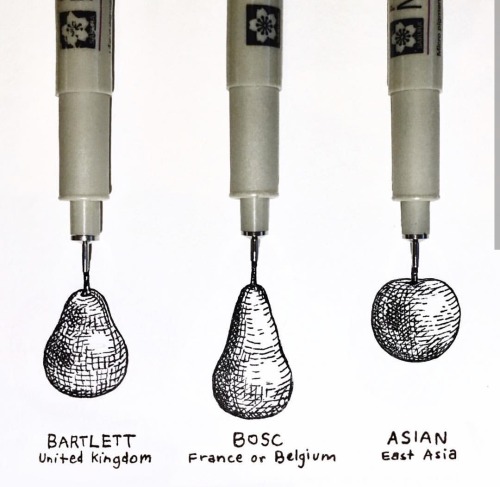

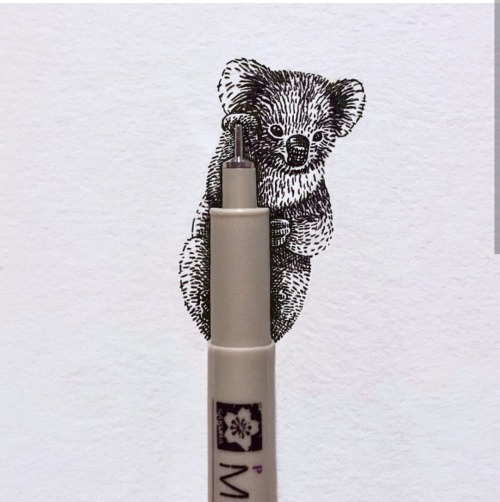


Art By IG: @bryanthegirl Instagram: @artwoonz
Here is a semester project in the 2012 Mechatronic control systems engineering module at San Jose State University. This is a Proportional-Integral-Derivative controlled (PID), 6 degree of freedom (6-DOF) Stewart platform, which basically means it has six axes on the top plate. This prototype uses 6 radio controlled servo motors instead of the traditional use of hydraulic jacks or electronic actuators. (this video has sound)
Proportional-Integral-Derivative:
A PID controller continuously calculates an error value as the difference between a measured process variable and a desired setpoint. The controller attempts to minimize the error over time by adjustment of a control variable, such as the position of a set of servo motors or actuators, to a new value, given by a weighted sum:

where Kp ,Ki , and Kd, all non-negative, denote the coefficients for the proportional, integral, and derivative terms, respectively (sometimes denoted P, I, and D).
P accounts for present values of the error , and is determined by the direction and magnitude the correction needs to be applied (e.g. if the error is large and positive, the control variable will be large and negative),
I accounts for past values of the error (e.g. if the output is not sufficient to reduce the size of the error, the control variable will accumulate over time, causing the controller to apply a stronger action through P), and
D accounts for possible future values of the error, based on its current rate of change. This part determines when and at what rate it needs to reduce the magnitude of its action, e.g as the ball fast approaches the desired set point at the centre of the plate.
[source]

A short note on how to interpret Fourier Series animations
When one searches for Fourier series animations online, these amazing gifs are what they stumble upon.
They are absolutely remarkable to look at. But what are the circles actually doing here?
Vector Addition
Your objective is to represent a square wave by combining many sine waves. As you know, the trajectory traced by a particle moving along a circle is a sinusoid:

This kind of looks like a square wave but we can do better by adding another harmonic.

We note that the position of the particle in the two harmonics can be represented as a vector that constantly changes with time like so:

And being vector quantities, instead of representing them separately, we can add them by the rules of vector addition and represent them a single entity i.e:



Source
The trajectory traced by the resultant of these vectors gives us our waveform.
And as promised by the Fourier series, adding in more and more harmonics reduces the error in the waveform obtained.


Have a good one!
**More amazing Fourier series gifs can be found here.
Breakfast far above the clouds, Pokut, Turkey

Glacial Striations and Stromatolites and Geology, oh my!
This photo is a two-fer: two awesome geology features in one! On the surface of this rock you will notice faint lines that stretch from the lower left hand corner of the image to the upper right hand corner. These lines are called glacial striations and they form as a glacier scratches the rock surface as it moves.
The rock surface that was scratched by the moving glacier represents an entirely different time, waaay before the glaciers, when stromatolites dotted the shoreline of an ancient water body that covered Montana. The circles that you see in the rock are the tops of stromatolites, formed by ancient cyanobacteria.
A great place to see stromatolites and striations is on the Grinnell Glacier Trail. For your best chance of seeing these features free of snow, try hiking the trail in late July or August. NPS Photo
[Image Description: Lines and circles etched into a rock surface.]


Entelodonts: terrifying.
Shown here compared to a modern pig skull on the left. (Entelodonts were actually more closely related to whales and hippos than pigs.)

-
 anongalu liked this · 1 month ago
anongalu liked this · 1 month ago -
 iwear-thekiara liked this · 4 months ago
iwear-thekiara liked this · 4 months ago -
 jg-2317 liked this · 8 months ago
jg-2317 liked this · 8 months ago -
 the-had-matter09 liked this · 9 months ago
the-had-matter09 liked this · 9 months ago -
 gamelpar reblogged this · 9 months ago
gamelpar reblogged this · 9 months ago -
 maverick-ornithography liked this · 1 year ago
maverick-ornithography liked this · 1 year ago -
 incorrigibly---frivolous reblogged this · 1 year ago
incorrigibly---frivolous reblogged this · 1 year ago -
 liquorice69 liked this · 1 year ago
liquorice69 liked this · 1 year ago -
 sentakatsukiofficial liked this · 1 year ago
sentakatsukiofficial liked this · 1 year ago -
 winterhuntsman liked this · 1 year ago
winterhuntsman liked this · 1 year ago -
 backgroundcharacterno15 reblogged this · 1 year ago
backgroundcharacterno15 reblogged this · 1 year ago -
backgroundcharacterno15 liked this · 1 year ago
-
 xngelbug liked this · 1 year ago
xngelbug liked this · 1 year ago -
 scentedzonkdreamerpeanut reblogged this · 1 year ago
scentedzonkdreamerpeanut reblogged this · 1 year ago -
scentedzonkdreamerpeanut liked this · 1 year ago
-
 eltheabberation reblogged this · 1 year ago
eltheabberation reblogged this · 1 year ago -
eltheabberation liked this · 1 year ago
-
 mossmaul reblogged this · 1 year ago
mossmaul reblogged this · 1 year ago -
mossmaul liked this · 1 year ago
-
 gurrenprime reblogged this · 1 year ago
gurrenprime reblogged this · 1 year ago -
gurrenprime liked this · 1 year ago
-
 alewyren reblogged this · 1 year ago
alewyren reblogged this · 1 year ago -
 beevean liked this · 1 year ago
beevean liked this · 1 year ago -
 ipsen reblogged this · 1 year ago
ipsen reblogged this · 1 year ago -
ipsen liked this · 1 year ago
-
 zoneco reblogged this · 1 year ago
zoneco reblogged this · 1 year ago -
zoneco liked this · 1 year ago
-
 wrencest liked this · 1 year ago
wrencest liked this · 1 year ago -
 marathehomosexual reblogged this · 1 year ago
marathehomosexual reblogged this · 1 year ago -
marathehomosexual liked this · 1 year ago
-
 miramiravictories liked this · 1 year ago
miramiravictories liked this · 1 year ago -
 hooniaddict reblogged this · 1 year ago
hooniaddict reblogged this · 1 year ago -
hooniaddict liked this · 1 year ago
-
 aqours reblogged this · 1 year ago
aqours reblogged this · 1 year ago -
aqours liked this · 1 year ago
-
 sburbiaoverture reblogged this · 1 year ago
sburbiaoverture reblogged this · 1 year ago -
 angel-fallz reblogged this · 1 year ago
angel-fallz reblogged this · 1 year ago -
 forgetful-amoeba reblogged this · 1 year ago
forgetful-amoeba reblogged this · 1 year ago -
 ahuhmm reblogged this · 1 year ago
ahuhmm reblogged this · 1 year ago -
ixbavdhwn liked this · 1 year ago
-
 khanmothman liked this · 1 year ago
khanmothman liked this · 1 year ago -
 kamicheetah reblogged this · 1 year ago
kamicheetah reblogged this · 1 year ago -
kamicheetah liked this · 1 year ago
-
 esquizo3214378 reblogged this · 1 year ago
esquizo3214378 reblogged this · 1 year ago -
esquizo3214378 liked this · 1 year ago
-
alienhazy reblogged this · 1 year ago
-
cocksadmirer liked this · 1 year ago
-
 itsjustagoober reblogged this · 1 year ago
itsjustagoober reblogged this · 1 year ago